About
As a determined and focused student, I strive to advance my career through a demanding internship opportunity. I am an active learner and I am willing to execute any assigned tasks. My strong motivation and commitment to push my limits make me believe that the best way to improve is by accepting new challenges, irrespective of how hard they may be.
New York University — Tandon School of Engineering
B.S. Electrical Engineering · 09/2023 – 05/2027 (Expected) · New York, USA
- Advanced GPA: 3.83
- Core Coursework: Digital Logic and State Machine Design, Fundamentals of Electronics I, Electric Circuits, Statics, Linear Algebra and Differential Equations, Calculus III, Physics II
Hardware-to-Modeling Mindset
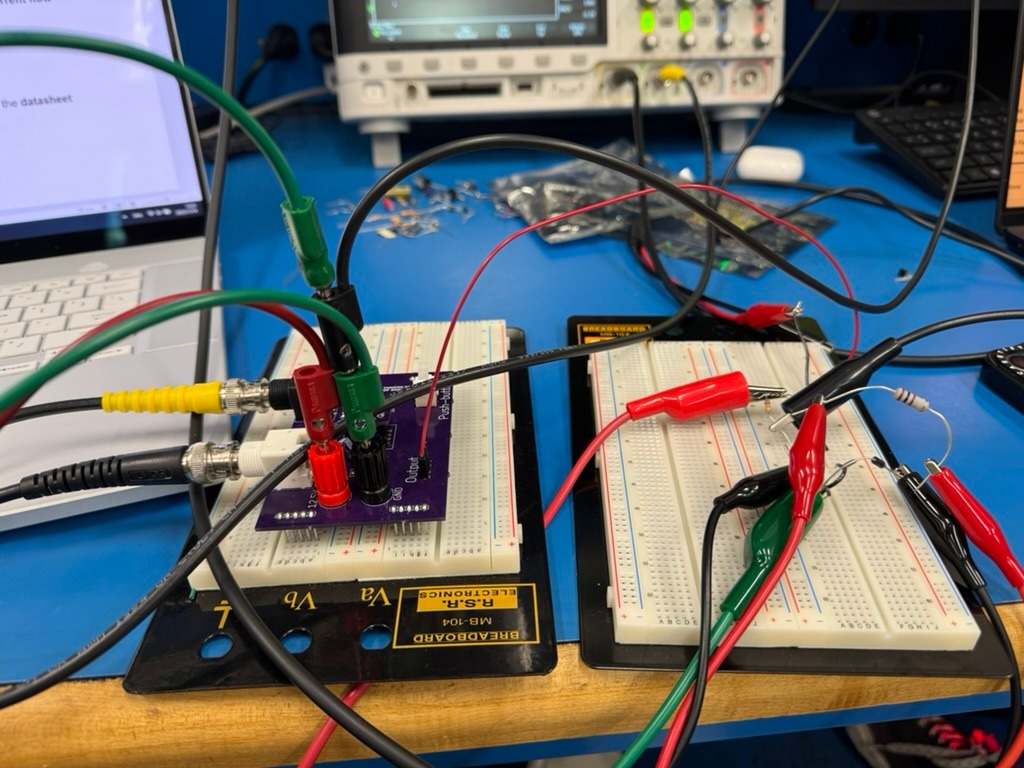
- Circuits implementation and lab testing (e.g., non-inverting op-amp experiments).
- Fabrication & prototyping: 3D printing, CNC machining, iterative mechanical design.
- Simulation & analysis exposure (e.g., FEA-based structure optimization study).
Research Interests
I am motivated by control-oriented engineering problems where algorithms meet physical constraints— especially in robotics and cyber-physical systems.
Control & Cyber-Physical Systems
Bridging theory to real behavior in physical systems.

- Feedback control, stability intuition, and system modeling.
- Practical constraints: sensing, latency, noise, actuator limits.
Robotics
Sensing–actuation loops and system integration.
- Robot subsystems: motors, drivers, control loops.
- Human-in-the-loop and reliability considerations.
Embedded & Motor Control
From PCB + firmware to measurable performance.

- Microcontrollers, embedded safety, and real-time coordination.
- Motor control stacks: sensing, drivers, and firmware logic.
Experience
Selected experiences spanning industry internship, lab research, and systems-level design.
XPeng Motors
Intern Product Management · Guangzhou, China- Conducted comprehensive market research on EV adoption trends in Japan, Indonesia, and Brazil
- Collaborated with cross-functional engineering and product teams to perform competitive benchmarking
- Built a custom web-crawler and Excel automation workflow to streamline Hong Kong sales-tracking reports

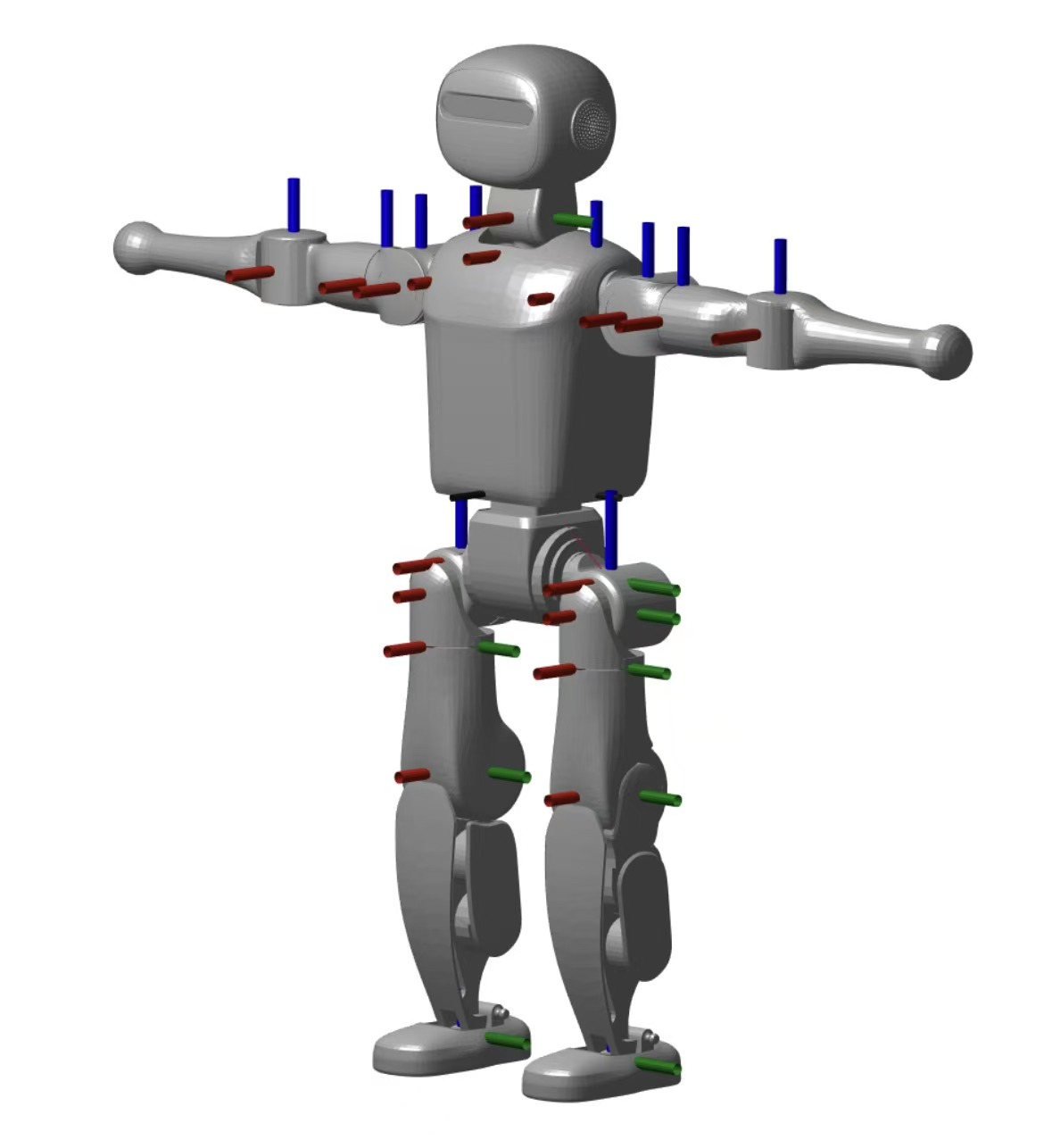
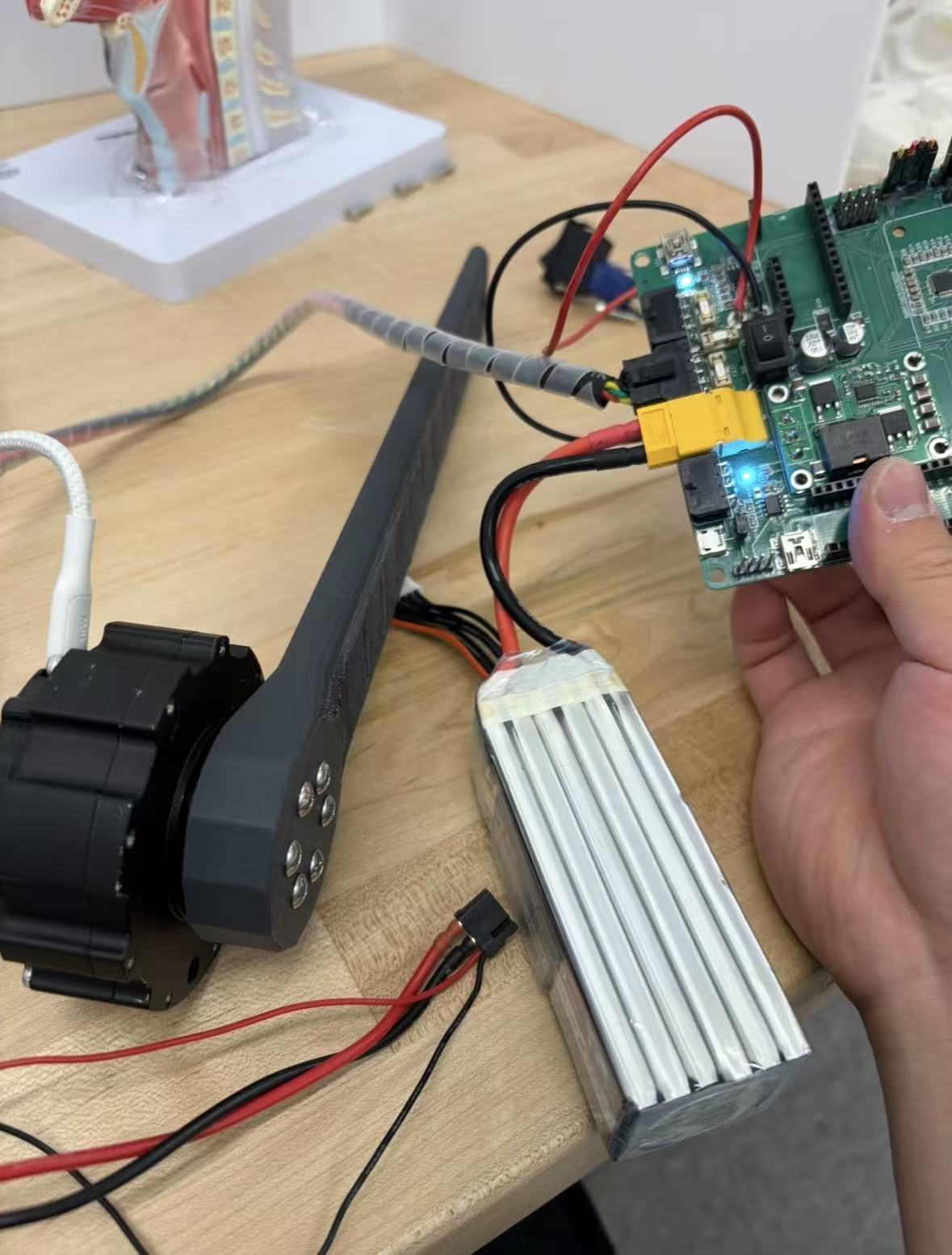
Biomechatronics and Intelligent Robotics Lab
Research NYU · Supervisor: Dr. Hao Su- Designed custom PCB for distributed motor-control modules
- Programmed coordination firmware to synchronize multi-joint motor behavior
- Modeled motor housings and structural components using Creo
- Evaluated human–exoskeleton interaction using motion-tracking workflows

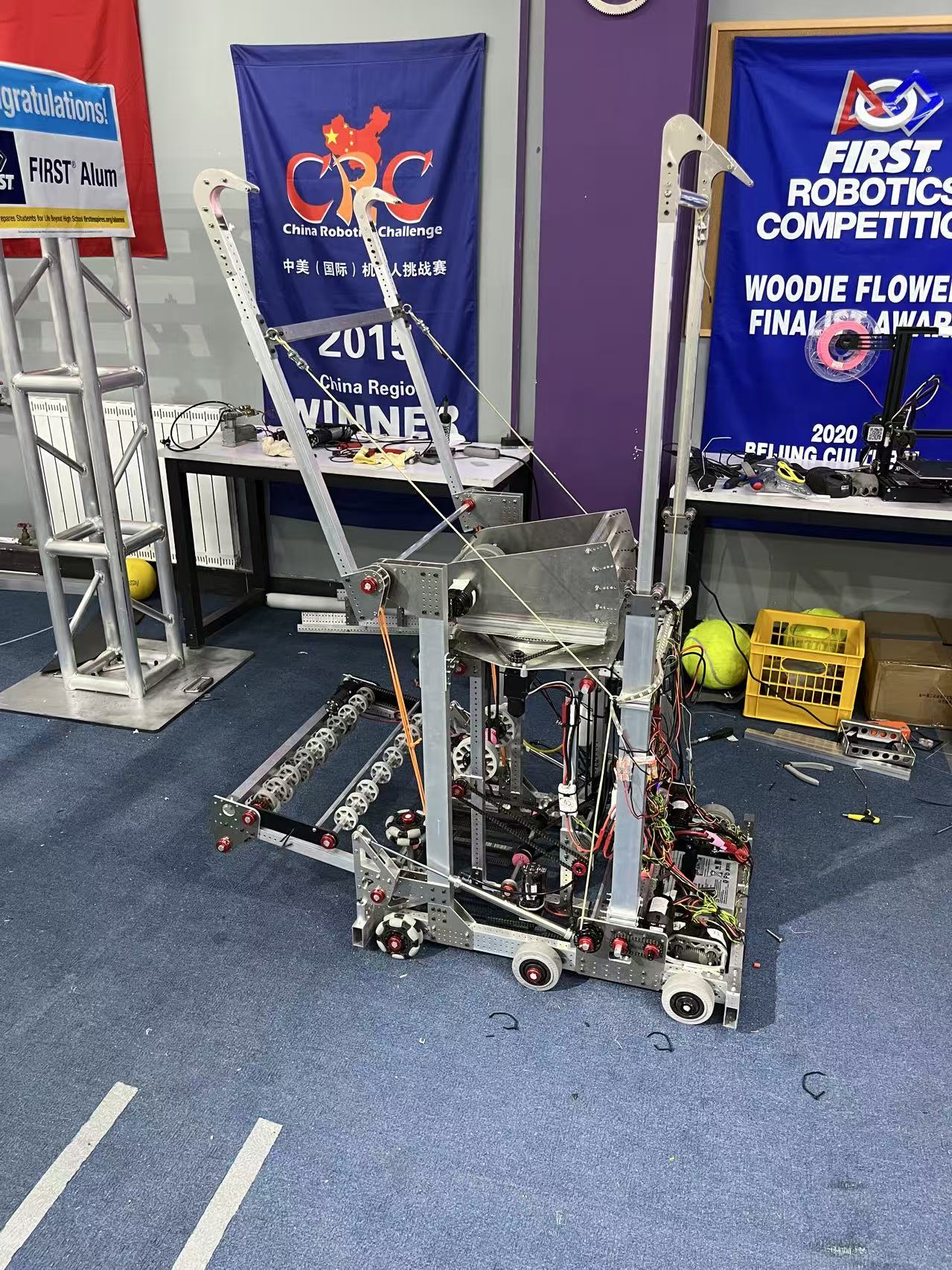
FRC Team 5451
Robotics Specialist- Core Member and Leader
- Designed adapting piece between cam and shooter by program adjustments using JAVA
Volunteer Teacher
Changsha, Hunan, China- Worked as volunteer teacher in Hunan, China with friends
- Set up creative classes and coursework for kids at school to learn and have fun
Projects
A selection of design and implementation work covering building-scale systems planning, prototyping, and independent engineering projects.
NYU Tandon Building Redesign (MetroTech 6)
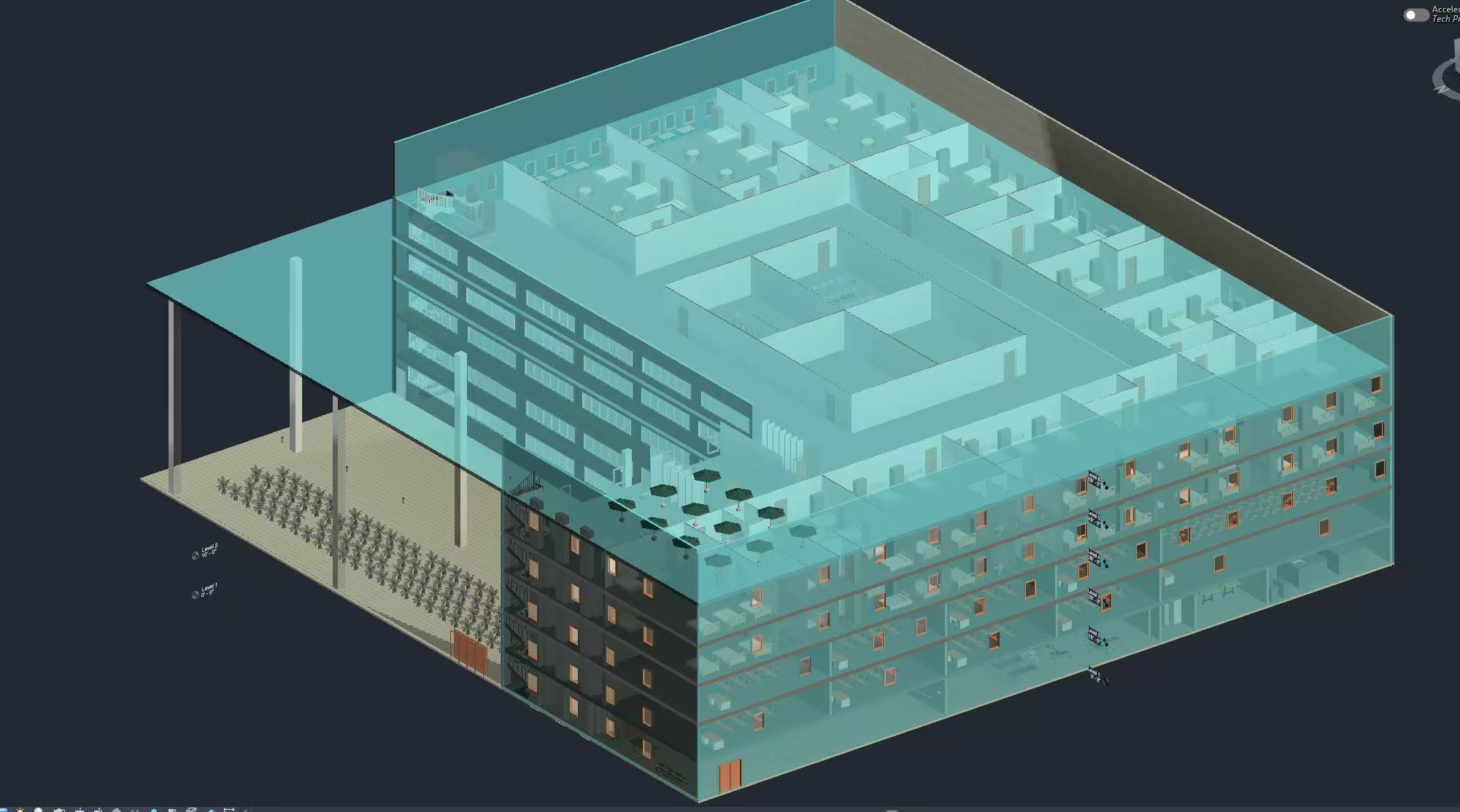
- Directed conceptual redesign of the NYU Metro 6 building layout
- Built full-scale digital models in Revit, including electrical mechanical and plumbing systems routing
- Fabricated a scaled physical prototype to validate structural configuration
Bike Frame Structure Optimization
- Mainly focused on analysis of materials with structural improvement
- Run multiple finite element analysis and simulation
- 10-page paper ready to publish

Prototyping & Structure Design
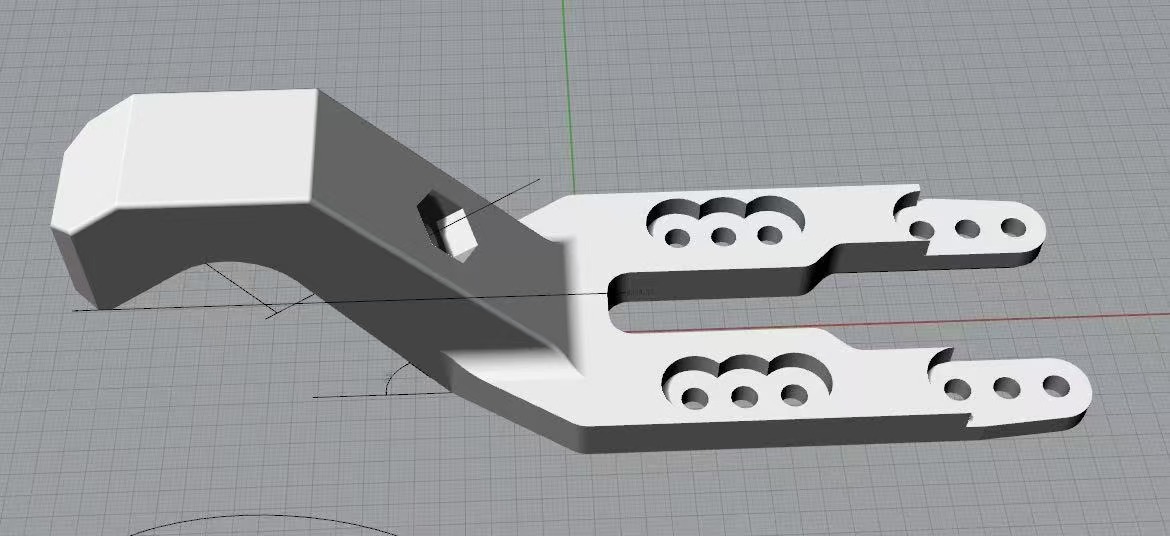
- Designed and 3D-printed longboard components with iterative fit/feedback cycles
- CNC-prototyped a carbon-fiber deck
- Implemented 3D toe wedge solutions; focused on geometry and reliability
Leadership & Activities
NYU Cycling Club
Vice President- Organized and hosted two University-wide Club Festivals
- Led weekly structured training sessions focused on sprint mechanics
- Managed logistics, budgeting, and safety protocols for regional racing events

Badminton Club
Founder & Leader- Founded School Badminton Club
- Organized badminton events between houses
Awards
- Champion, 2023 Beijing Longboard Marathon (U18 Division)
- 7th Place, 2025 Reddish Knob Downhill Race (Open Class)

Skills
Core technical competencies developed through coursework, research, and projects.
Programming & Tools
- Python
- Excel
- Verilog
- Xilinx Vivado
- Creo
- SolidWorks
- ANSYS
- Revit
- AutoCAD
Domains
- Embedded systems
- Motor control
- PCB design
- Mechanical design
- Rapid prototyping
- Team Leadership
Languages
- English (Fluent)
- Mandarin (Native)
Contact
Feel free to reach out regarding research, projects, opportunities in control systems / robotics, or just to connect.
Email: sl10445@nyu.edu
Phone: (718)431-4806
LinkedIn: linkedin.com/in/sichen-liang-32933b2b9
GitHub: github.com/SichenLiang
MakerWorld: makerworld.com/en/@sichen_liang233
Location: New York, USA